


































Jan 01, 1970
Зашто неки егзоскелети чине ходање лакшим од других
Предуго; Читати
ИП анализа открива да АМТЦ подстиче активно ангажовање корисника, идеално за рехабилитацију, док ХТЦ смањује напор, задовољавајући индустријске потребе. Оптимизација контролера водича за метрике.Аутори:
(1) Мохаммад Шуштари, Одсек за машинство и мехатронику, Универзитет Ватерло (смсхусхтари@уватерлоо.ца);
(2) Јулиа Фоеллмер, Одсек за механику и океанско инжењерство, Технолошки универзитет у Хамбургу (јулиа.фоеллмер@тухх.де);
(3) Сањаи Крисхна Гоуда, Одсек за машинство и мехатронику, Универзитет Ватерло и Институт за рехабилитацију у Торонту (КИТЕ), Универзитетска здравствена мрежа (арасх.арами@уватерлоо.ца).
Табела веза
2 Ресултс
2.1 Почетни обрађени подаци за репрезентативног учесника
2.3 Анализа портрета интеракције
2.4 Индивидуална стратегија прилагођавања
3 Дискусија
5 Методе
5.1 Стратегије контроле унапред
5.2 Експериментално подешавање
Додатак А Комплементарни пример података
Додатак Б Поређење са природним ходањем
3.2 Важност ИП анализе
На слици 3А, нижи укупни мишићни напор током ходања са ХТЦ и АМТЦ у поређењу са ТБЦ је у складу са њиховом нижом стопом метаболизма у односу на ТБЦ, што указује да оба контролора смањују напор ходања више од егзоскелета који контролише ТБЦ. Међутим, сличан тренд није примећен у укупном обртном моменту интеракције, где је ХТЦ резултирао већим обртним моментом интеракције у поређењу са
ТБЦ. Ово указује да иако су ХТЦ и АМТЦ смањили брзину метаболизма и мишићни напор корисника, они су подстакли кориснике да усвоје две различите стратегије интеракције. ИП анализа даље истражује ефекат сваког контролера на перформансе сваког учесника анализом разлике у укупном мишићном напору у односу на разлику у укупном моменту интеракције човека и егзоскелета. Слика 4 открива да је до смањења брзине метаболизма дошло на основу две различите људске стратегије адаптације. У ХТЦ контролеру, корисници су препустили контролу егзоскелета, пасивно пратећи кретање егзоскелета. Насупрот томе, АМТЦ је подстицао кориснике да активније воде покрет. Наша ИП анализа сугерише да је ХТЦ контролер посебно погодан за апликације које захтевају повећање снаге, као што су индустријске средине за раднике или здравствена окружења за медицинске сестре. У овим контекстима, примарни циљ је да се минимизира људски напор, чиме се повећавају оперативне способности и безбедност. Насупрот томе, АМТЦ контролер показује веће обећање у рехабилитационим контекстима за појединце са резидуалним моторичким функцијама, као што су они са непотпуним повредама кичмене мождине или условима након можданог удара. Овде је императив активно укључити корисника у извршавање задатака, чиме се појачавају његове моторичке функције и убрзавају процеси опоравка.
Слика 4 такође показује да су различити учесници усвојили конзистентнију стратегију са АМТЦ-ом у поређењу са ХТЦ-ом, пошто просечни ИП вектори међу учесницима показују мање варијације са АМТЦ-ом у поређењу са ХТЦ контролером.
Сама ИП дистрибуција такође може да расветли снагу усвојене стратегије код сваког учесника у зависности од радијуса вектора који формирају ИП. Ово је очигледније на слици 5 где свака тачка ИП представља разлику у напору мишића и моменту интеракције добијеном за сваки корак. Као пример, ИП анализа на слици 5 открива да су Учесник #3 (2. ред, 2. колона) и Учесник #6 (2. ред, прва колона) усвојили исту стратегију интеракције са АМТЦ контролером у поређењу са ТБЦ. Ово је, ипак, значајније за Учесника #6 због већег радијуса дистрибуираних тачака у поређењу са Учесником #3.
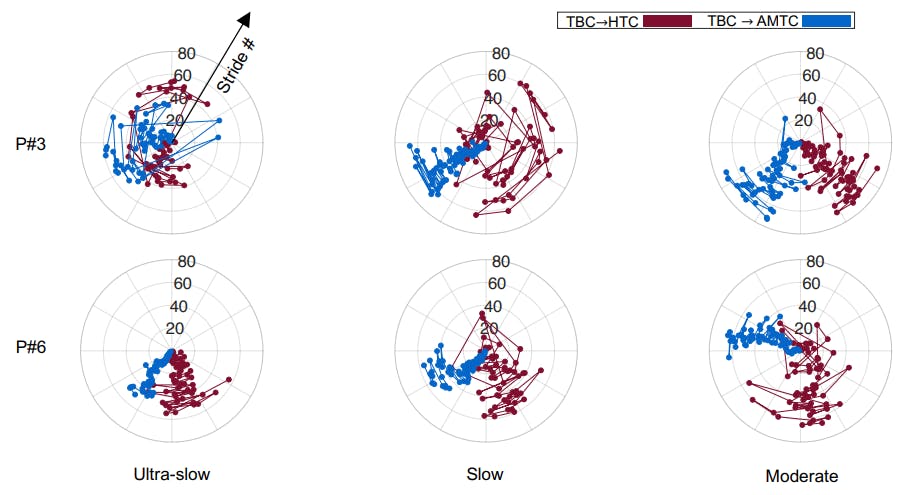
Користећи ИП анализу, такође је могуће пратити еволуцију усвојене стратегије преко корака при свакој брзини ходања. Слика 7, као пример, приказује еволуцију ИП фазе за свако од поређења ТБЦ→ХТЦ и ТБЦ→АМТЦ за учеснике #3 и #6, респективно. Подразумевано великим варијацијама у ИП фази, Учесник #3 није конвергирао на доследну стратегију интеракције ни са ХТЦ ни са АМТЦ контролерима током ултра спорог хода. Овај недостатак конвергенције до доследне интеракције са егзоскелетом слаже се са нашим потешкоћама у одржавању глаткости и континуитета ултраспорих покрета, што је могуће објаснити ограничењима динамичких примитива који често доводе до сегментираних покрета (Парк, ет ал., 2017). У спором ходању, међутим, корисник је усвојио конзистентнију стратегију користећи АМТЦ, о чему сведоче мале варијације у ИП фази. У случају ХТЦ контролера, стратегија учесника остаје недоследна. Само у случају ходања умереном брзином, Учесник #3 је био у стању да конвергира на доследне стратегије интеракције и са АМТЦ и са ХТЦ контролерима. Наша ИП анализа у овом случају показује да је АМТЦ смањио интеракцију човека и егзоскелета, али корисник није у потпуности добио контролу кретања или препустио кретање егзоскелету, пошто је ИП фаза још увек у трећем квадранту. У случају ХТЦ контролера, корисник се више ослањао на помоћ егзоскелета пошто је ИП фаза првенствено концентрисана у 4. квадранту. Учесник #6, за разлику од учесника #3, конвергирао је у доследну интеракцију са егзоскелетом при све три брзине хода. ХТЦ контролер је, без обзира на брзину ходања, навео учесника да се више ослања на егзоскелет пошто је ИП фаза углавном концентрисана на граници 3. и 4. квадранта. У случају АМТЦ контролера, међутим, примећујемо да како се брзина хода повећава, корисничка стратегија се више развија ка вођењу хода и доприносу контроли покрета, о чему сведочи померање од 83 степена у просечној ИП фази при умереној брзини ходање у поређењу са ултра-спорим ходањем.
Ови резултати су показали способност ИП анализе да обезбеди објективно поређење различитих контролера егзоскелета, усвојену стратегију интеракције од стране корисника, као и процену коадаптације корисника и егзоскелета. Поред ванмрежне анализе, ИП пружа дизајнерима квантитативну метрику која се може подесити у поставци оптимизације за човека у петљи како би прилагодили контролер егзоскелета према јединственим захтевима сваке апликације или учесника.
Овај рад је доступан на аркив под лиценцом ЦЦ БИ-НЦ-НД 4.0 ДЕЕД.
L O A D I N G
. . . comments & more!
. . . comments & more!

