






















Autores:
(1) Mohammad Shushtari, Departamento de Engenharia Mecânica e Mecatrônica, Universidade de Waterloo ([email protected]);
(2) Julia Foellmer, Departamento de Mecânica e Engenharia Oceânica, Universidade de Tecnologia de Hamburgo ([email protected]);
(3) Sanjay Krishna Gouda, Departamento de Engenharia Mecânica e Mecatrônica, Universidade de Waterloo e Instituto de Reabilitação de Toronto (KITE), University Health Network ([email protected]).
Tabela de Links
2 Resultados
2.1 Dados Processados Iniciais para um Participante Representante
2.2 Análise geral de desempenho
2.3 Análise de Retrato de Interação
2.4 Estratégia de Adaptação Individual
3 Discussão
3.2 Importância da Análise de PI
5 Métodos
5.1 Estratégias de controle de feedforward
Apêndice A Dados Complementares de Exemplo
Apêndice B Comparação com Caminhada Natural
3.2 Importância da Análise de PI
Na Fig. 3A, o menor esforço muscular total durante a caminhada com o HTC e AMTC em comparação com o TBC é consistente com sua menor taxa metabólica em relação ao TBC, indicando que ambos os controladores reduzem o esforço de caminhada mais do que o exoesqueleto controlado pelo TBC. No entanto, uma tendência semelhante não foi observada no torque de interação total, onde o HTC resultou em maior torque de interação em comparação com o

TBC. Isso indica que, embora HTC e AMTC reduzissem a taxa metabólica e o esforço muscular dos usuários, eles encorajaram os usuários a adotar duas estratégias de interação diferentes. A análise de IP investiga ainda mais o efeito de cada controlador no desempenho de cada participante, analisando a diferença no esforço muscular total em relação à diferença no torque total de interação humano-exoesqueleto. A Fig. 4 revela que a diminuição da taxa metabólica ocorreu com base em duas estratégias de adaptação humana diferentes. No controlador HTC, os usuários cederam o controle ao exoesqueleto, seguindo passivamente o movimento do exoesqueleto. Em contraste, o AMTC encorajou os usuários a liderar o movimento mais ativamente. Nossa análise de IP sugere que o controlador HTC é particularmente adequado para aplicações que exigem aumento de potência, como em ambientes industriais para trabalhadores ou ambientes de saúde para enfermeiros. Nesses contextos, o objetivo principal é minimizar o esforço humano, aumentando assim as capacidades operacionais e a segurança. Por outro lado, o controlador AMTC mostra-se mais promissor em contextos de reabilitação para indivíduos com funções motoras residuais, como aqueles com lesões incompletas da medula espinhal ou condições pós-AVC. Aqui, o imperativo é envolver ativamente o usuário na execução da tarefa, ampliando assim suas funções motoras e acelerando os processos de recuperação.
A Fig. 4 também demonstra que diferentes participantes adotaram uma estratégia mais consistente com o AMTC em comparação ao HTC, já que os vetores IP médios entre os participantes apresentam menor variação com o AMTC em comparação ao controlador HTC.
A distribuição do IP em si também pode lançar luz sobre a força da estratégia adotada em cada participante, dependendo do raio dos vetores que formam o IP. Isso é mais evidente na Fig. 5, onde cada ponto do IP representa a diferença no esforço muscular e no torque de interação obtidos para cada passada. Como exemplo, a análise do IP na Fig. 5 revela que o Participante nº 3 (2ª linha, 2ª coluna) e o Participante nº 6 (2ª linha, primeira coluna) adotaram a mesma estratégia de interação com o controlador AMTC em comparação com o TBC. Isso é, no entanto, mais significativo para o Participante nº 6 devido ao raio maior dos pontos distribuídos em comparação com os do Participante nº 3.
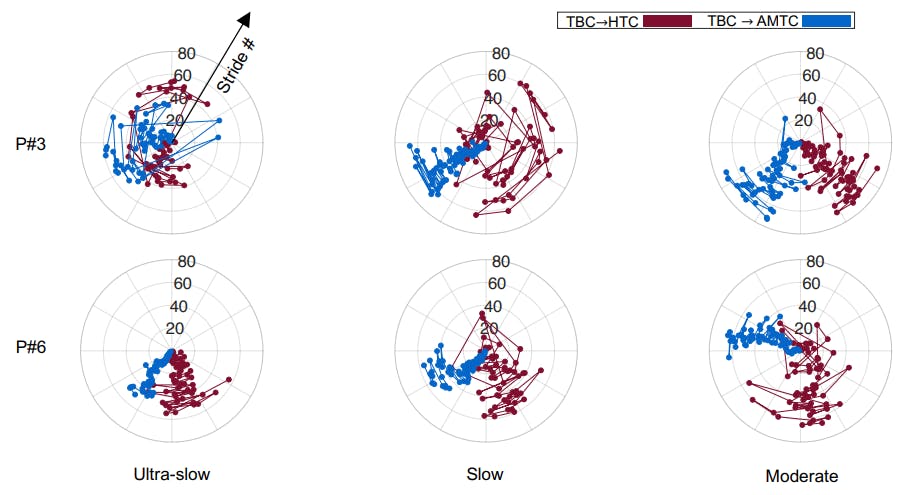
Usando a análise de IP, também é possível rastrear a evolução da estratégia adotada ao longo da passada em cada velocidade de caminhada. A Fig. 7, como exemplo, mostra a evolução da fase IP para cada uma das comparações TBC→HTC e TBC→AMTC para os participantes #3 e #6, respectivamente. Implícito pela grande variação na fase IP, o Participante #3 não convergiu para uma estratégia de interação consistente nem com os controladores HTC nem AMTC durante a caminhada ultralenta. Essa falta de convergência para uma interação consistente com o exoesqueleto concorda com nossa dificuldade em manter a suavidade e a continuidade dos movimentos ultralentos, possivelmente explicada por limitações de primitivos dinâmicos que frequentemente levam a movimentos segmentados (Park, et al., 2017). Na caminhada lenta, no entanto, o usuário adotou uma estratégia mais consistente usando AMTC, evidenciada por baixas variações na fase IP. No caso do controlador HTC, a estratégia do participante permanece inconsistente. Somente no caso de caminhada em velocidade moderada o Participante #3 foi capaz de convergir para estratégias de interação consistentes tanto com os controladores AMTC quanto com os HTC. Nossa análise de IP neste caso mostra que o AMTC diminuiu a interação humano-exoesqueleto, mas o usuário não obteve completamente o controle do movimento ou cedeu o movimento ao exoesqueleto, pois a fase IP ainda está no terceiro quadrante. No caso do controlador HTC, o usuário confiou mais na assistência do exoesqueleto, pois a fase IP está concentrada principalmente no 4º quadrante. O Participante #6, em contraste com o Participante #3, convergiu para uma interação consistente com o exoesqueleto em todas as três velocidades de caminhada. O controlador HTC, independentemente da velocidade de caminhada, orientou o participante a confiar mais no exoesqueleto, pois a fase IP está concentrada principalmente na borda do 3º e 4º quadrantes. No caso do controlador AMTC, no entanto, observamos que, à medida que a velocidade da marcha aumenta, a estratégia do usuário se desenvolve mais no sentido de liderar a marcha e contribuir para o controle do movimento, evidenciado por uma mudança de 83 graus na fase IP média na caminhada em velocidade moderada em comparação à caminhada ultralenta.
Esses resultados demonstraram a capacidade da análise de IP de fornecer uma comparação objetiva de diferentes controladores de exoesqueleto, a estratégia de interação adotada pelo usuário, bem como avaliar a coadaptação usuário-exoesqueleto. Além da análise offline, o IP fornece aos designers uma métrica quantitativa que pode ser ajustada em uma configuração de otimização de humano no loop para adaptar o controlador de exoesqueleto aos requisitos exclusivos de cada aplicação ou participante.
Este artigo está disponível no arxiv sob a licença CC BY-NC-ND 4.0 DEED.








