






















Autores:
(1) Mohammad Shushtari, Departamento de Ingeniería Mecánica y Mecatrónica, Universidad de Waterloo ([email protected]);
(2) Julia Foellmer, Departamento de Mecánica e Ingeniería Oceánica, Universidad Tecnológica de Hamburgo ([email protected]);
(3) Sanjay Krishna Gouda, Departamento de Ingeniería Mecánica y Mecatrónica, Universidad de Waterloo y el Instituto de Rehabilitación de Toronto (KITE), Red de Salud Universitaria ([email protected]).
Tabla de enlaces
2 resultados
2.1 Datos iniciales procesados para un participante representativo
2.2 Análisis general del rendimiento
2.3 Análisis de retratos de interacción
2.4 Estrategia de adaptación individual
3 Discusión
3.2 Importancia del análisis de la propiedad intelectual
5 métodos
5.1 Estrategias de control de retroalimentación
5.2 Configuración experimental
Apéndice A Datos complementarios de ejemplo
Apéndice B Comparación con la marcha natural
3.2 Importancia del análisis de la propiedad intelectual
En la Fig. 3A, el menor esfuerzo muscular total durante la marcha con el HTC y el AMTC en comparación con el TBC es coherente con su menor tasa metabólica con respecto al TBC, lo que indica que ambos controladores reducen el esfuerzo de marcha más que el exoesqueleto controlado por el TBC. Sin embargo, no se ha observado una tendencia similar en el par de interacción total, donde el HTC resultó en un par de interacción más alto en comparación con el

TBC. Esto indica que, aunque tanto el HTC como el AMTC redujeron la tasa metabólica y el esfuerzo muscular de los usuarios, alentaron a los usuarios a adoptar dos estrategias de interacción diferentes. El análisis de IP investiga más a fondo el efecto de cada controlador en el rendimiento de cada participante al analizar la diferencia en el esfuerzo muscular total con respecto a la diferencia en el torque total de interacción humano-exoesqueleto. La figura 4 revela que la disminución en la tasa metabólica se produjo en función de dos estrategias de adaptación humana diferentes. En el controlador HTC, los usuarios cedieron el control al exoesqueleto, siguiendo pasivamente el movimiento del exoesqueleto. Por el contrario, el AMTC alentó a los usuarios a liderar el movimiento de manera más activa. Nuestro análisis de IP sugiere que el controlador HTC es particularmente adecuado para aplicaciones que requieren aumento de potencia, como en entornos industriales para trabajadores o entornos de atención médica para enfermeras. En estos contextos, el objetivo principal es minimizar el esfuerzo humano, mejorando así las capacidades operativas y la seguridad. Por el contrario, el controlador AMTC muestra una mayor promesa en contextos de rehabilitación para personas con funciones motoras residuales, como aquellas con lesiones incompletas de la médula espinal o condiciones posteriores a un accidente cerebrovascular. Aquí, el imperativo es involucrar activamente al usuario en la ejecución de la tarea, amplificando así sus funciones motoras y acelerando los procesos de recuperación.
La figura 4 también demuestra que los diferentes participantes adoptaron una estrategia más consistente con AMTC en comparación con HTC, ya que los vectores de IP promedio entre los participantes exhiben una menor variación con AMTC en comparación con el controlador HTC.
La distribución de IP por sí misma también puede arrojar luz sobre la fuerza de la estrategia adoptada en cada participante dependiendo del radio de los vectores que forman la IP. Esto es más evidente en la Figura 5, donde cada punto de IP representa la diferencia en el esfuerzo muscular y el torque de interacción obtenido para cada zancada. Como ejemplo, el análisis de IP en la Figura 5 revela que el Participante #3 (2da fila, 2da columna) y el Participante #6 (2da fila, primera columna) adoptaron la misma estrategia de interacción con el controlador AMTC en comparación con el TBC. Esto es, sin embargo, más significativo para el Participante #6 debido al radio más grande de los puntos distribuidos en comparación con los del Participante #3.
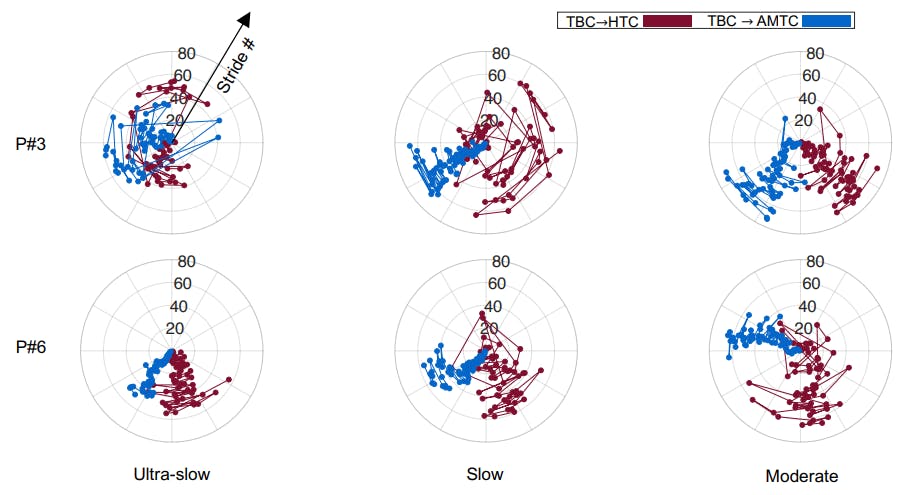
Utilizando el análisis de IP, también es posible rastrear la evolución de la estrategia adoptada a lo largo de la zancada a cada velocidad de caminata. La Figura 7, como ejemplo, muestra la evolución de la fase IP para cada una de las comparaciones TBC→HTC y TBC→AMTC para los participantes n.° 3 y n.° 6, respectivamente. Como lo implica la gran variación en la fase IP, el participante n.° 3 no convergió a una estrategia de interacción consistente ni con los controladores HTC ni AMTC durante la caminata ultralenta. Esta falta de convergencia a una interacción consistente con el exoesqueleto concuerda con nuestra dificultad para mantener la suavidad y la continuidad de los movimientos ultralentos, posiblemente explicada por las limitaciones de los primitivos dinámicos que a menudo conducen a movimientos segmentados (Park, et al., 2017). Sin embargo, en la caminata lenta, el usuario adoptó una estrategia más consistente utilizando AMTC, evidenciada por bajas variaciones en la fase IP. En el caso del controlador HTC, la estrategia del participante sigue siendo inconsistente. Solo en el caso de caminar a velocidad moderada, el participante n.° 3 pudo converger hacia estrategias de interacción consistentes tanto con el controlador AMTC como con el controlador HTC. Nuestro análisis de IP en este caso muestra que el controlador AMTC disminuyó la interacción humano-exoesqueleto, pero el usuario no obtuvo completamente el control del movimiento ni cedió el movimiento al exoesqueleto, ya que la fase IP todavía está en el tercer cuadrante. En el caso del controlador HTC, el usuario ha dependido más de la asistencia del exoesqueleto ya que la fase IP se concentra principalmente en el cuarto cuadrante. El participante n.° 6, en contraste con el participante n.° 3, convergió hacia una interacción consistente con el exoesqueleto en las tres velocidades de caminata. El controlador HTC, independientemente de la velocidad de caminata, ha guiado al participante a confiar más en el exoesqueleto ya que la fase IP se concentra principalmente en el límite de los cuadrantes 3.° y 4.°. Sin embargo, en el caso del controlador AMTC, observamos que a medida que aumenta la velocidad de la marcha, la estrategia del usuario se desarrolla más hacia liderar la marcha y contribuir al control del movimiento, evidenciado por un cambio de 83 grados en la fase IP promedio en la caminata a velocidad moderada en comparación con la caminata ultralenta.
Estos resultados demostraron la capacidad del análisis IP para proporcionar una comparación objetiva de diferentes controladores de exoesqueleto, la estrategia de interacción adoptada por el usuario, así como evaluar la coadaptación entre el usuario y el exoesqueleto. Además del análisis fuera de línea, IP proporciona a los diseñadores una métrica cuantitativa que se puede ajustar en un entorno de optimización con intervención humana para adaptar el controlador de exoesqueleto a los requisitos únicos de cada aplicación o participante.
Este artículo está disponible en arxiv bajo la licencia CC BY-NC-ND 4.0 DEED.








