






















著者:
(1)ウォータールー大学機械・メカトロニクス工学部、モハマド・シュシュタリ([email protected])
(2)ハンブルク工科大学機械海洋工学部ジュリア・フォルマー([email protected])
(3)サンジェイ・クリシュナ・ゴーダ、ウォータールー大学機械・メカトロニクス工学部、トロントリハビリテーション研究所(KITE)、大学医療ネットワーク([email protected])。
リンク一覧
2 件の結果
3 議論
5つの方法
3.2 IP分析の重要性
図3Aでは、HTCとAMTCの歩行中における総筋力はTBCに比べて低いが、これはTBCに比べて代謝率が低いことと一致しており、両コントローラがTBC制御の外骨格よりも歩行努力を軽減していることがわかる。しかし、同様の傾向は総相互作用トルクでは見られず、HTCはTBC制御の外骨格と比較してより高い相互作用トルクをもたらした。

TBC。これは、HTC と AMTC は両方ともユーザーの代謝率と筋力を軽減しましたが、ユーザーに 2 つの異なる相互作用戦略を採用するように促したことを示しています。IP 分析では、合計筋力の差を人間と外骨格の合計相互作用トルクの差に関して分析することにより、各コントローラーが各参加者のパフォーマンスに与える影響をさらに調査します。図 4 は、代謝率の低下が 2 つの異なる人間の適応戦略に基づいて発生したことを示しています。HTC コントローラーでは、ユーザーは外骨格に制御を委ね、外骨格の動きに受動的に従いました。対照的に、AMTC はユーザーがより積極的に動きをリードするように促しました。IP 分析では、HTC コントローラーは、労働者の産業環境や看護師の医療環境など、パワー増強を必要とするアプリケーションに特に適していることが示唆されています。これらのコンテキストでは、主な目標は人間の労力を最小限に抑え、それによって操作能力と安全性を高めることです。逆に、AMTC コントローラーは、脊髄損傷が不完全な人や脳卒中後の状態など、残存運動機能を持つ人のリハビリテーションの場面で大きな可能性を秘めています。この場合、ユーザーを積極的にタスク実行に参加させることが不可欠であり、それによって運動機能が強化され、回復プロセスが加速されます。
図 4 は、参加者間の平均 IP ベクトルが HTC コントローラーと比較して AMTC でより低い変動を示していることから、さまざまな参加者が HTC と比較して AMTC でより一貫した戦略を採用したことも示しています。
IP 分布自体も、IP を形成するベクトルの半径に応じて、各参加者が採用した戦略の強さを明らかにすることができます。これは、IP の各ポイントが各ストライドで得られた筋肉の努力と相互作用トルクの差を表す図 5 でより明らかです。例として、図 5 の IP 分析では、参加者 #3 (2 行目、2 列目) と参加者 #6 (2 行目、1 列目) が、TBC と比較して AMTC コントローラーで同じ相互作用戦略を採用したことがわかります。それでも、参加者 #3 と比較して分布ポイントの半径が大きいため、これは参加者 #6 にとってより重要です。
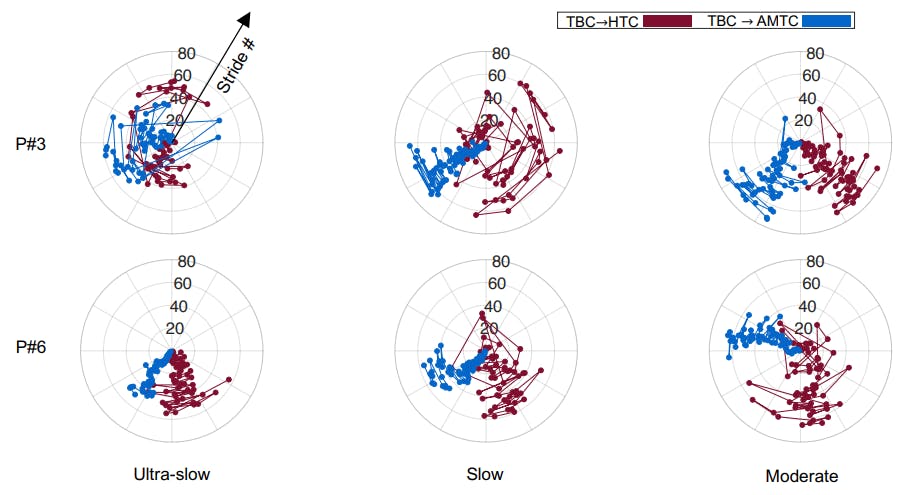
IP 分析を使用すると、各歩行速度でのストライド全体にわたって採用された戦略の進化を追跡することもできます。図 7 は、例として、参加者 #3 と #6 のそれぞれについて、TBC→HTC と TBC→AMTC の比較における IP フェーズの進化を示しています。IP フェーズの大きな変動が示唆するように、参加者 #3 は、超低速歩行中に HTC コントローラーと AMTC コントローラーのどちらとも一貫した相互作用戦略に収束しませんでした。外骨格との一貫した相互作用へのこの収束の欠如は、超低速動作の滑らかさと連続性を維持するのが難しいことと一致しており、これはおそらく、セグメント化された動作につながることが多い動的プリミティブの制限によって説明できます (Park ら、2017)。ただし、低速歩行では、ユーザーは AMTC を使用してより一貫した戦略を採用しました。これは、IP フェーズの変動が低いことから明らかです。HTC コントローラーの場合、参加者の戦略は一貫性がありません。中速歩行の場合のみ、参加者 3 は AMTC と HTC コントローラーの両方で一貫したインタラクション戦略に収束することができました。この場合の IP 分析では、AMTC によって人間と外骨格のインタラクションが減少したものの、IP フェーズがまだ第 3 象限にあるため、ユーザーは動作制御を完全に取得したり、外骨格に動作を譲ったりしなかったことが示されています。HTC コントローラーの場合、IP フェーズは主に第 4 象限に集中しているため、ユーザーは外骨格の支援にさらに依存しています。参加者 6 は、参加者 3 とは対照的に、3 つの歩行速度すべてで外骨格との一貫したインタラクションに収束しました。HTC コントローラーは、歩行速度に関係なく、IP フェーズが主に第 3 象限と第 4 象限の境界に集中しているため、参加者が外骨格にさらに依存するように誘導しました。しかし、AMTC コントローラーの場合、歩行速度が増加するにつれて、ユーザー戦略は歩行をリードし、動作制御に貢献する方向に発展することが観察されます。これは、中速歩行と超低速歩行とを比較した場合の平均 IP 位相の 83 度のシフトによって証明されています。
これらの結果は、IP 分析がさまざまな外骨格コントローラーの客観的な比較、ユーザーが採用したインタラクション戦略、およびユーザーと外骨格の相互適応を評価する能力を備えていることを示しています。オフライン分析に加えて、IP は設計者に定量的なメトリックを提供し、これをヒューマンインザループ最適化設定で調整して、各アプリケーションまたは参加者の固有の要件に合わせて外骨格コントローラーを調整できます。
この論文は、CC BY-NC-ND 4.0 DEED ライセンスの下でarxiv で公開されています。








