






















автори:
(1) Mohammad Shushtari, Катедра по механично и мехатронно инженерство, University of Waterloo ([email protected]);
(2) Юлия Фьолмер, Катедра по механика и океанско инженерство, Технически университет в Хамбург ([email protected]);
(3) Санджай Кришна Гауда, Катедра по механично и мехатронно инженерство, Университет Ватерло и Институт за рехабилитация на Торонто (KITE), Университетска здравна мрежа ([email protected]).
Таблица с връзки
2 резултата
2.1 Първоначално обработени данни за представителен участник
2.2 Цялостен анализ на ефективността
2.3 Анализ на портрет на взаимодействие
2.4 Индивидуална стратегия за адаптиране
3 Дискусия
5 Методи
5.1 Стратегии за предварителен контрол
Приложение A Допълнителни примерни данни
Приложение B Сравнение с естествено ходене
3.2 Значение на IP анализа
На Фиг. 3A по-ниското общо мускулно усилие по време на ходене с HTC и AMTC в сравнение с TBC е в съответствие с тяхната по-ниска метаболитна скорост по отношение на TBC, което показва, че и двата контролера намаляват усилието при ходене повече от TBC-контролирания екзоскелет. Подобна тенденция обаче не е наблюдавана в общия въртящ момент на взаимодействие, където HTC доведе до по-висок въртящ момент на взаимодействие в сравнение с

TBC. Това показва, че въпреки че HTC и AMTC намаляват скоростта на метаболизма и мускулните усилия на потребителите, те насърчават потребителите да възприемат две различни стратегии за взаимодействие. IP анализът допълнително изследва ефекта на всеки контролер върху представянето на всеки участник чрез анализиране на разликата в общото мускулно усилие по отношение на разликата в общия момент на взаимодействие човек-екзоскелет. Фигура 4 разкрива, че намаляването на скоростта на метаболизма е настъпило въз основа на две различни човешки адаптационни стратегии. В контролера на HTC потребителите се отказаха от контрола на екзоскелета, пасивно следвайки движението на екзоскелета. За разлика от тях, AMTC насърчи потребителите да ръководят движението по-активно. Нашият IP анализ предполага, че HTC контролерът е особено подходящ за приложения, изискващи увеличаване на мощността, като например в индустриални условия за работници или здравни среди за медицински сестри. В този контекст основната цел е да се сведе до минимум човешкото усилие, като по този начин се подобрят оперативните способности и безопасността. Обратно, контролерът AMTC показва по-голямо обещание в контекста на рехабилитация за лица с остатъчни двигателни функции, като тези с непълни наранявания на гръбначния мозък или състояния след инсулт. Тук императивът е активното включване на потребителя в изпълнението на задачата, като по този начин се усилват неговите двигателни функции и се ускоряват процесите на възстановяване.
Фигура 4 също показва, че различните участници са възприели по-последователна стратегия с AMTC в сравнение с HTC, тъй като средните IP вектори между участниците показват по-ниска вариация с AMTC в сравнение с HTC контролера.
Самото IP разпространение също може да хвърли светлина върху силата на възприетата стратегия във всеки участник в зависимост от радиуса на векторите, формиращи IP. Това е по-очевидно на Фиг. 5, където всяка точка от IP представлява разликата в мускулното усилие и въртящия момент на взаимодействие, получени за всяка крачка. Като пример, IP анализът на фиг. 5 разкрива, че участник #3 (2-ри ред, 2-ра колона) и участник #6 (2-ри ред, първа колона) са приели една и съща стратегия за взаимодействие с контролера AMTC в сравнение с TBC. Това обаче е по-важно за Участник #6 поради по-големия радиус на разпределените точки в сравнение с тези на Участник #3.
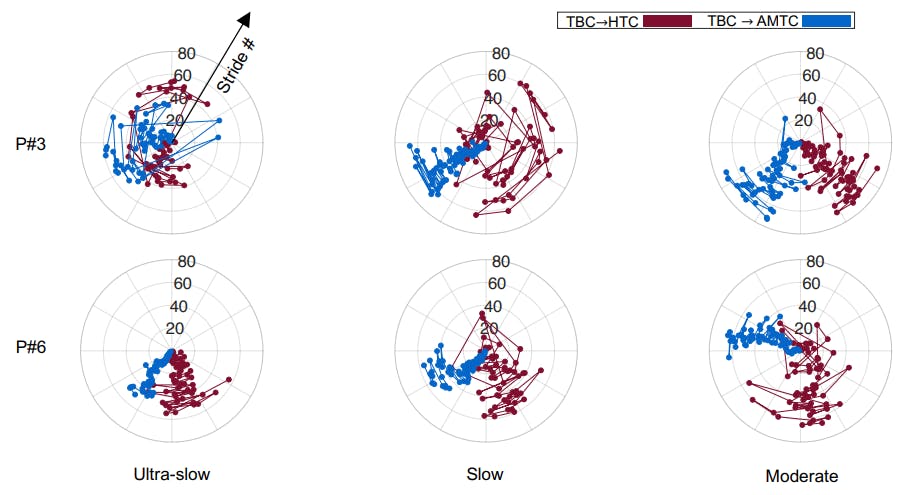
С помощта на IP анализа също е възможно да се проследи развитието на възприетата стратегия през крачката при всяка скорост на ходене. Фигура 7, като пример, показва развитието на IP фазата за всяко от сравненията TBC→HTC и TBC→AMTC за участници #3 и #6, съответно. Подразбирайки се от голямата вариация във фазата на IP, участник #3 не достигна до последователна стратегия за взаимодействие нито с HTC, нито с контролерите AMTC по време на ултрабавно ходене. Тази липса на конвергенция към последователно взаимодействие с екзоскелета е в съответствие с нашата трудност при поддържането на плавност и непрекъснатост на ултра-бавните движения, вероятно обяснени с ограниченията на динамичните примитиви, които често водят до сегментирани движения (Park, et al., 2017). При бавно ходене обаче потребителят възприе по-последователна стратегия, използвайки AMTC, което се доказва от ниските вариации във фазата на IP. В случая с контролера на HTC стратегията на участника остава непоследователна. Само в случай на ходене с умерена скорост Участник №3 успя да се сближи с последователни стратегии за взаимодействие както с AMTC, така и с HTC контролерите. Нашият IP анализ в този случай показва, че AMTC намалява взаимодействието човек-екзоскелет, но потребителят не е получил напълно контрола на движението или не е отстъпил движението на екзоскелета, тъй като IP фазата все още е в третия квадрант. В случая с контролера на HTC потребителят разчита повече на помощта на екзоскелета, тъй като IP фазата е концентрирана основно в 4-ти квадрант. Участник №6, за разлика от Участник №3, достигна до последователно взаимодействие с екзоскелета и при трите скорости на ходене. HTC контролерът, независимо от скоростта на ходене, е насочил участника да разчита повече на екзоскелета, тъй като IP фазата е концентрирана най-вече на границата на 3-ти и 4-ти квадрант. В случая с контролера AMTC обаче наблюдаваме, че с увеличаването на скоростта на походката потребителската стратегия се развива повече към водене на походката и допринасяне за контрола на движението, доказано от 83-градусово изместване в средната IP фаза при умерена скорост ходене в сравнение със свръхбавното ходене.
Тези резултати показаха способността на IP анализа да осигури обективно сравнение на различни екзоскелетни контролери, възприетата стратегия за взаимодействие от потребителя, както и оценка на съвместната адаптация потребител-екзоскелет. Освен офлайн анализ, IP предоставя на дизайнерите количествена метрика, която може да бъде настроена в настройка за оптимизация от човек в цикъла, за да приспособи контролера на екзоскелета към уникалните изисквания на всяко приложение или участник.
Този документ е достъпен в arxiv под лиценз CC BY-NC-ND 4.0 DEED.




