






















Tekijät:
(1) Mohammad Shushtari, Mekaniikan ja mekatroniikan laitos, Waterloon yliopisto ([email protected]);
(2) Julia Foellmer, Hampurin teknillisen yliopiston mekaniikka- ja meritekniikan osasto ([email protected]);
(3) Sanjay Krishna Gouda, Mekaniikan ja mekatroniikan laitos, Waterloon yliopisto ja Toronto Rehabilitation Institute (KITE), University Health Network ([email protected]).
Linkkitaulukko
2 tulosta
2.1 Edustavan osallistujan alustavat käsitellyt tiedot
2.2 Yleisen suorituskyvyn analyysi
2.3 Vuorovaikutusmuotokuva-analyysi
2.4 Yksilöllinen sopeutumisstrategia
3 Keskustelu
5 menetelmät
5.1 Feedforward-ohjausstrategiat
Liite A Täydentävät esimerkkitiedot
Liite B Vertailu luonnolliseen kävelyyn
3.2 IP-analyysin merkitys
Kuvassa 3A pienempi kokonaislihasvoima HTC:llä ja AMTC:llä kävellessä verrattuna TBC:hen on yhdenmukainen niiden alhaisemman aineenvaihduntanopeuden kanssa suhteessa TBC:hen, mikä osoittaa, että molemmat säätimet vähentävät kävelyponnistusta enemmän kuin TBC-ohjattu eksoskeleton. Samanlaista suuntausta ei kuitenkaan ole havaittu kokonaisvuorovaikutusmomentissa, jossa HTC johti korkeampaan vuorovaikutusmomenttiin verrattuna

TBC. Tämä osoittaa, että vaikka HTC ja AMTC molemmat alensivat käyttäjien aineenvaihduntaa ja lihasvoimaa, ne rohkaisivat käyttäjiä ottamaan käyttöön kaksi erilaista vuorovaikutusstrategiaa. IP-analyysi tutkii edelleen kunkin ohjaimen vaikutusta kunkin osallistujan suorituskykyyn analysoimalla eroa kokonaislihasponnistuksessa suhteessa eroon ihmisen ja eksoskeleton vuorovaikutuksen kokonaisvääntömomentissa. Kuvio 4 paljastaa, että aineenvaihduntanopeuden lasku tapahtui kahden erilaisen ihmisen sopeutumisstrategian perusteella. HTC-ohjaimessa käyttäjät luovuttivat hallinnan eksoskeletonille seuraten passiivisesti eksoskeleton liikettä. Sitä vastoin AMTC rohkaisi käyttäjiä johtamaan liikettä aktiivisemmin. IP-analyysimme viittaa siihen, että HTC-ohjain soveltuu erityisen hyvin tehonlisäystä vaativiin sovelluksiin, kuten työntekijöiden teollisuusympäristöihin tai sairaanhoitajien terveydenhuoltoympäristöihin. Näissä yhteyksissä ensisijaisena tavoitteena on minimoida ihmisen rasitus, mikä parantaa toimintakykyä ja turvallisuutta. Sitä vastoin AMTC-ohjain on lupaavampi kuntoutustilanteissa henkilöille, joilla on jäännösmotorisia toimintoja, kuten henkilöille, joilla on epätäydellinen selkäydinvamma tai aivohalvauksen jälkeiset tilat. Tässä on välttämätöntä ottaa käyttäjä aktiivisesti mukaan tehtävien suorittamiseen, mikä vahvistaa hänen motorisia toimintojaan ja nopeuttaa palautumisprosesseja.
Kuvio 4 osoittaa myös, että eri osallistujat omaksuivat johdonmukaisemman strategian AMTC:n kanssa HTC:hen verrattuna, koska osallistujien keskimääräiset IP-vektorit vaihtelevat vähemmän AMTC:n kanssa HTC-ohjaimeen verrattuna.
IP-jakelu itsessään voi myös valaista valitun strategian vahvuutta kussakin osallistujassa IP:n muodostavien vektorien säteen mukaan. Tämä näkyy selvemmin kuvassa 5, jossa jokainen IP-piste edustaa eroa lihasponnistuksessa ja vuorovaikutusmomentissa, joka on saatu kullakin askeleella. Esimerkkinä IP-analyysi kuviossa 5 paljastaa, että osallistuja #3 (2. rivi, 2. sarake) ja osallistuja #6 (2. rivi, ensimmäinen sarake) omaksuivat saman vuorovaikutusstrategian AMTC-ohjaimen kanssa TBC:hen verrattuna. Tämä on kuitenkin merkittävämpää osallistujalle #6, koska jaettujen pisteiden säde on suurempi kuin osallistuja #3.
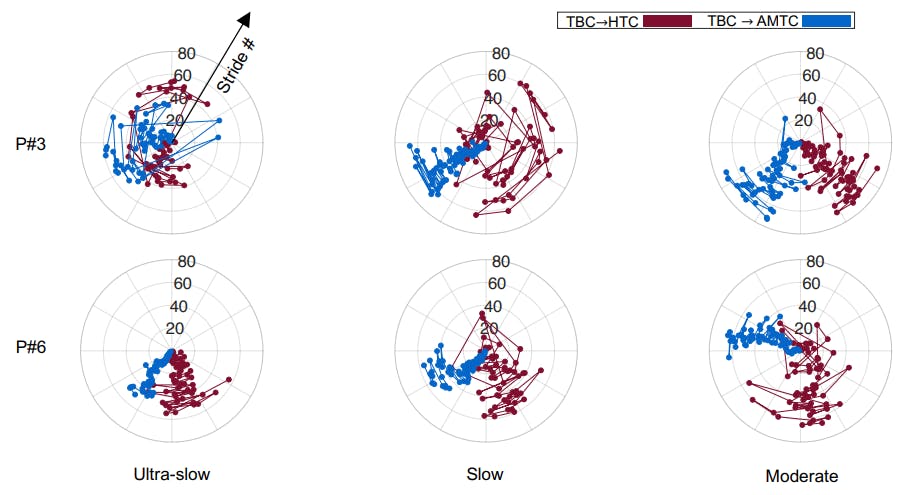
IP-analyysin avulla on myös mahdollista seurata valitun strategian kehitystä askeleen poikki jokaisella kävelynopeudella. Esimerkkinä kuvio 7 esittää IP-vaiheen kehitystä kussakin TBC→HTC- ja TBC→AMTC-vertailussa osallistujille 3 ja 6, vastaavasti. IP-vaiheen suuresta vaihtelusta johtuen osallistuja #3 ei lähentynyt johdonmukaiseen vuorovaikutusstrategiaan ei HTC- tai AMTC-ohjainten kanssa ultrahidasan kävelyn aikana. Tämä konvergenssin puute johdonmukaiseen vuorovaikutukseen eksoskeletonin kanssa on samaa mieltä vaikeuksistamme säilyttää erittäin hitaiden liikkeiden sujuvuus ja jatkuvuus, mikä mahdollisesti selittyy dynaamisten primitiivien rajoituksilla, jotka usein johtavat segmentoituihin liikkeisiin (Park et al., 2017). Hitaassa kävelyssä käyttäjä kuitenkin omaksui johdonmukaisemman strategian käyttämällä AMTC:tä, mistä on osoituksena IP-vaiheen alhaiset vaihtelut. HTC-ohjaimen tapauksessa osallistujan strategia on edelleen epäjohdonmukainen. Vain kohtalaisen nopean kävelyn tapauksessa osallistuja #3 pystyi omaksumaan johdonmukaiset vuorovaikutusstrategiat sekä AMTC- että HTC-ohjainten kanssa. IP-analyysimme tässä tapauksessa osoittaa, että AMTC vähensi ihmisen ja eksoskeleton vuorovaikutusta, mutta käyttäjä ei täysin saanut liikkeen ohjausta tai luovuttanut liikettä eksoskeletonille, koska IP-vaihe on edelleen kolmannessa neljänneksessä. HTC-ohjaimen tapauksessa käyttäjä on luottanut enemmän eksoskeleton apuun, koska IP-vaihe keskittyy ensisijaisesti 4. kvadranttiin. Osallistuja #6, toisin kuin osallistuja #3, konvergoi johdonmukaiseen vuorovaikutukseen eksoskeleton kanssa kaikilla kolmella kävelynopeudella. HTC-ohjain on kävelynopeudesta riippumatta ohjannut osallistujan luottamaan enemmän eksoskeletonin, koska IP-vaihe keskittyy enimmäkseen 3. ja 4. neljänneksen rajalle. AMTC-ohjaimen tapauksessa havaitsemme kuitenkin, että askelnopeuden kasvaessa käyttäjän strategia kehittyy enemmän askeleen ohjaamiseen ja liikkeenhallintaan osallistumiseen, mistä on osoituksena 83 asteen siirtymä keskimääräisessä IP-vaiheessa kohtalaisessa nopeudessa. kävely verrattuna ultrahitaan kävelyyn.
Nämä tulokset osoittivat IP-analyysin kyvyn tarjota objektiivinen vertailu erilaisista eksoskeleton ohjaimista, käyttäjän valitsemasta vuorovaikutusstrategiasta sekä arvioida käyttäjän ja eksoskeleton yhteissopeutumista. Offline-analyysin lisäksi IP tarjoaa suunnittelijoille kvantitatiivisen mittarin, joka voidaan virittää ihmissilmukan optimointiasetuksella, jotta eksoskeletonohjain voidaan räätälöidä kunkin sovelluksen tai osallistujan ainutlaatuisten vaatimusten mukaan.
Tämä paperi on saatavilla arxivissa CC BY-NC-ND 4.0 DEED -lisenssillä.








