






















מחברים:
(1) מוחמד שושטרי, המחלקה להנדסת מכונות ומכטרוניקה, אוניברסיטת ווטרלו ([email protected]);
(2) יוליה פולמר, המחלקה למכניקה והנדסת אוקיינוסים, האוניברסיטה הטכנולוגית של המבורג ([email protected]);
(3) סנג'אי קרישנה גאודה, המחלקה להנדסת מכונות ומכטרוניקה, אוניברסיטת ווטרלו ומכון השיקום של טורונטו (KITE), רשת הבריאות של האוניברסיטה ([email protected]).
טבלת קישורים
2 תוצאות
2.1 נתונים מעובדים ראשוניים עבור משתתף מייצג
3 דיון
5 שיטות
5.1 אסטרטגיות שליטה בהזנה קדימה
3.2 חשיבות ניתוח IP
באיור 3A, המאמץ השרירי הכולל הנמוך יותר במהלך ההליכה עם HTC ו-AMTC בהשוואה ל-TBC עולה בקנה אחד עם קצב חילוף החומרים הנמוך יותר שלהם ביחס ל-TBC, מה שמעיד על כך ששני הבקרים מפחיתים את מאמץ ההליכה יותר מהשלד החיצוני הנשלט על ידי TBC. עם זאת, מגמה דומה לא נצפתה במומנט האינטראקציה הכולל, כאשר HTC הביא למומנט אינטראקציה גבוה יותר בהשוואה ל-

TBC. זה מצביע על כך שלמרות ש-HTC ו-AMTC הפחיתו שניהם את קצב חילוף החומרים והמאמץ השרירי של המשתמשים, הם עודדו משתמשים לאמץ שתי אסטרטגיות אינטראקציה שונות. ניתוח IP חוקר את ההשפעה של כל בקר על הביצועים של כל משתתף על ידי ניתוח ההבדל במאמץ השרירי הכולל ביחס להבדל במומנט האינטראקציה הכולל בין אדם לשלד. איור 4 מגלה שהירידה בקצב חילוף החומרים התרחשה על סמך שתי אסטרטגיות הסתגלות אנושיות שונות. בבקר HTC, המשתמשים ויתרו על השליטה לשלד החיצוני, בעקבות תנועת השלד החיצוני באופן פסיבי. לעומת זאת, AMTC עודדה את המשתמשים להוביל את התנועה בצורה פעילה יותר. ניתוח ה-IP שלנו מצביע על כך שבקר ה-HTC מתאים במיוחד ליישומים הדורשים הגדלת כוח, כגון בהגדרות תעשייתיות לעובדים או בסביבות בריאות לאחיות. בהקשרים אלה, המטרה העיקרית היא למזער את המאמץ האנושי, ובכך לשפר את היכולות המבצעיות והבטיחות. לעומת זאת, בקר ה-AMTC מראה הבטחה גדולה יותר בהקשרי שיקום עבור אנשים עם תפקודים מוטוריים שיוריים, כגון אלה עם פציעות לא שלמות בחוט השדרה או מצבים לאחר שבץ מוחי. כאן, ההכרח הוא לערב את המשתמש באופן פעיל בביצוע המשימות, ובכך להגביר את הפונקציות המוטוריות שלו ולהאיץ את תהליכי ההתאוששות.
איור 4 גם מדגים שמשתתפים שונים אימצו אסטרטגיה עקבית יותר עם AMTC בהשוואה ל-HTC, שכן וקטורי ה-IP הממוצעים בין המשתתפים מציגים וריאציה נמוכה יותר עם AMTC בהשוואה לבקר HTC.
הפצת IP עצמה יכולה גם לשפוך אור על עוצמת האסטרטגיה שאומצה בכל משתתף בהתאם לרדיוס של הוקטורים היוצרים את ה-IP. זה בולט יותר באיור 5 שבו כל נקודת IP מייצגת את ההבדל במאמץ השריר ובמומנט האינטראקציה המתקבל עבור כל צעד. כדוגמה, ניתוח ה-IP באיור 5 מגלה כי משתתף #3 (שורה 2, עמודה 2) ומשתתף #6 (שורה 2, עמודה ראשונה) אימצו את אותה אסטרטגיית אינטראקציה עם בקר AMTC בהשוואה ל-TBC. זה, עם זאת, משמעותי יותר עבור משתתף מס' 6 בשל הרדיוס הגדול יותר של הנקודות המפוזרות בהשוואה לאלו של משתתף מס' 3.
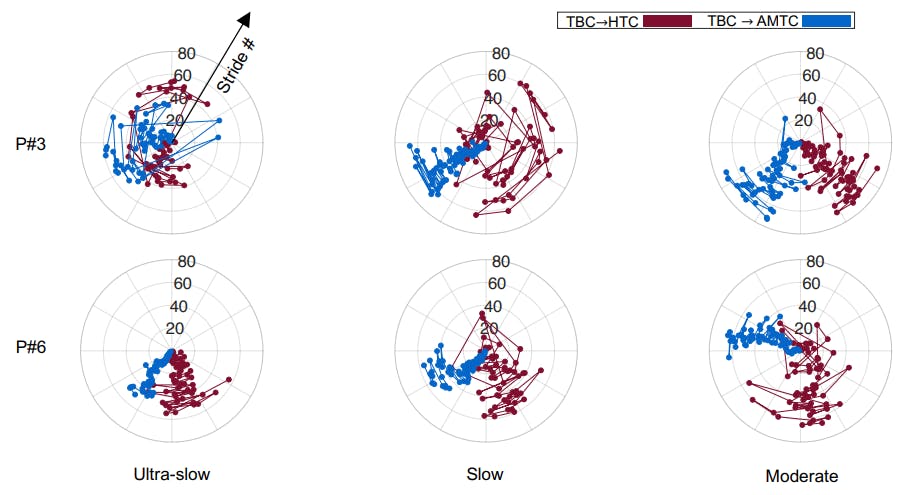
באמצעות ניתוח ה-IP, ניתן גם לעקוב אחר התפתחות האסטרטגיה שאומצה לאורך הצעד בכל מהירות הליכה. איור 7, כדוגמה, מציג את ההתפתחות של שלב ה-IP עבור כל אחת מההשוואות TBC→HTC ו-TBC→AMTC עבור משתתפים מס' 3 ו-#6, בהתאמה. משתמע מהשונות הגדולה בשלב ה-IP, משתתף מס' 3 לא התכנס לאסטרטגיית אינטראקציה עקבית עם בקרי HTC או AMTC במהלך הליכה איטית במיוחד. חוסר התכנסות זה לאינטראקציה עקבית עם השלד החיצוני תואם את הקושי שלנו לשמור על חלקות והמשכיות של תנועות איטיות במיוחד, אולי מוסבר על ידי מגבלות של פרימיטיבים דינמיים שמובילים לעתים קרובות לתנועות מפולחות (Park, et al., 2017). בהליכה איטית, לעומת זאת, המשתמש אימץ אסטרטגיה עקבית יותר באמצעות AMTC, המעידה על וריאציות נמוכות בשלב ה-IP. במקרה של בקר HTC, האסטרטגיה של המשתתף נשארת לא עקבית. רק במקרה של הליכה במהירות בינונית הצליח משתתף מס' 3 להתכנס לאסטרטגיות אינטראקציה עקביות הן עם בקרי ה-AMTC והן עם בקרי ה-HTC. ניתוח ה-IP שלנו במקרה זה מראה ש-AMTC הפחית את האינטראקציה בין אדם לשלד חיצוני, אך המשתמש לא השיג לחלוטין את בקרת התנועה או העניק את התנועה לשלד החיצוני, מכיוון ששלב ה-IP עדיין נמצא ברביע השלישי. במקרה של בקר ה-HTC, המשתמש הסתמך יותר על סיוע בשלד חיצוני מכיוון ששלב ה-IP מתרכז בעיקר ברביע הרביעי. משתתף מס' 6, בניגוד למשתתף מס' 3, התכנס לאינטראקציה עקבית עם השלד החיצוני בכל שלוש מהירויות ההליכה. בקר ה-HTC, ללא קשר למהירות ההליכה, הנחה את המשתתף להסתמך יותר על השלד החיצוני שכן שלב ה-IP מתרכז בעיקר בגבול הרבעים השלישי והרביעי. עם זאת, במקרה של בקר ה-AMTC, אנו רואים שככל שמהירות ההליכה עולה, אסטרטגיית המשתמש מתפתחת יותר לקראת הובלת ההליכה ותרומה לשליטה בתנועה, עדות לשינוי של 83 מעלות בשלב ה-IP הממוצע במהירות בינונית הליכה בהשוואה להליכה איטית במיוחד.
תוצאות אלו הציגו את היכולת של ניתוח IP לספק השוואה אובייקטיבית של בקרי שלד חיצוני שונים, את אסטרטגיית האינטראקציה שאומצה על ידי המשתמש, כמו גם הערכת התאמה משותפת של משתמש ושלד חיצוני. מלבד ניתוח לא מקוון, IP מספקת למעצבים מדד כמותי שניתן לכוונן בהגדרת אופטימיזציה אנושית בלולאה כדי להתאים את בקר השלד החיצוני לדרישות הייחודיות של כל אפליקציה או משתתף.
מאמר זה זמין ב-arxiv תחת רישיון CC BY-NC-ND 4.0 DEED.








