























लिङ्कहरूको तालिका
प्रस्तावित दृष्टिकोण
C. हाइपरप्लेनहरूमा दूरीको परिप्रेक्ष्यबाट MLR को सूत्रीकरण
H. क्यानोनिकल प्रतिनिधित्वको गणना
४ प्रयोगहरू
4.1 मानव कार्य मान्यता
हामी तीन डेटासेटहरू प्रयोग गर्छौं, जस्तै, HDM05 (Muller et al., 2007), FPHA (Garcia-Hernando et al., 2018), र ¨ NTU RBG+D 60 (NTU60) (Sharoudy et al., 2016)। हामी हाम्रा नेटवर्कहरूलाई निम्न अत्याधुनिक मोडेलहरूसँग तुलना गर्छौं: SPDNet (Huang & Gool, 2017)[1], SPDNetBN (Brooks et al., 2019)[2], SPSDAI (Nguyen, 2022a), GyroAI- HAUNet (Nguyen, 2022b), र MLR-AI (Nguyen & याङ, २०२३)।
4.1.1 पृथक अध्ययन
SPD न्यूरल नेटवर्कहरूमा कन्भोलुसनल लेयरहरू हाम्रो नेटवर्क GyroSpd++ मा कन्भोलुसनल लेयरको शीर्षमा MLR लेयर स्ट्याक गरिएको छ (चित्र 1 हेर्नुहोस्)। एक convolutional तह प्रयोग गर्न को लागी प्रेरणा

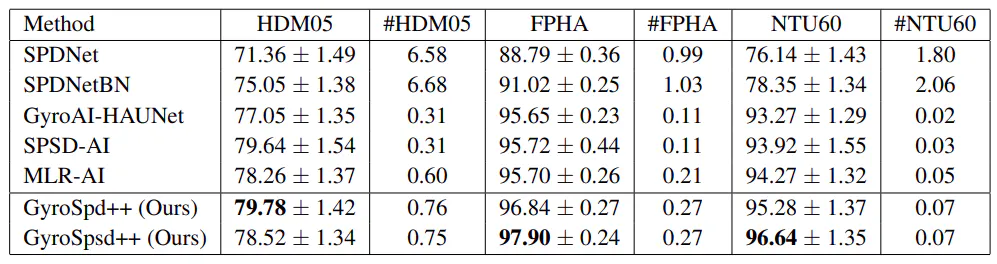


यो हो कि यसले स्थानीयहरूबाट विश्वव्यापी सुविधाहरू निकाल्न सक्छ (एक कार्य अनुक्रमको उप-अनुक्रमहरू भित्र संयुक्त समन्वयबाट गणना गरिएको सह-विभाजन म्याट्रिक्सहरू)। हामी कन्भोलुसनल लेयरको लागि Affine-Invariant मेट्रिक्स र MLR लेयरको लागि Log-Euclidean मेट्रिक्स प्रयोग गर्छौं। ट्याबमा परिणामहरू। 1 ले देखाउँछ कि GyroSpd++ लगातार SPD आधारभूत रेखाहरूलाई औसत शुद्धताको हिसाबले बाहिर निकाल्छ। GyroSpd++ का नतिजाहरू यसका तहहरूको लागि Riemannian मेट्रिक्सको विभिन्न डिजाइनहरूसँग परिशिष्ट D.4.1 मा दिइएको छ।
संरचना स्पेसहरूमा MLR हामी खण्ड 3.3 मा प्रस्तावित MLR तहको साथ GyroSpd++ को MLR तह प्रतिस्थापन गरेर GyroSpsd++ निर्माण गर्छौं। GyroSpsd++ को नतिजा ट्याबमा दिइएको छ। 1. SPSDAI बाहेक, GyroSpsd++ ले HDM05 डेटासेटमा अन्य आधाररेखाहरूलाई औसत शुद्धताको हिसाबले अगाडि बढाउँछ। यसबाहेक, GyroSpsd++ ले GyroSpd++ र FPHA र NTU60 डेटासेटहरूमा भएका सबै आधारभूतहरूलाई औसत शुद्धताको हिसाबले अगाडि बढाउँछ। यी नतिजाहरूले देखाउँछन् कि MLR प्रभावकारी हुन्छ जब संरचना रिक्त स्थानहरूमा gyrovector अन्तरिक्ष परिप्रेक्ष्यबाट डिजाइन गरिन्छ।
4.2 नोड वर्गीकरण
हामीले तीनवटा डेटासेटहरू प्रयोग गर्छौं, जस्तै, एयरपोर्ट (Zhang र चेन, 2018), Pubmed (Namata et al., 2012a), र Cora (Sen et al., 2008), ती प्रत्येकले हजारौं लेबल नोडहरू भएको एकल ग्राफ समावेश गर्दछ। हामी हाम्रो नेटवर्क Gr-GCN++ (चित्र 1 हेर्नुहोस्) लाई यसको भिन्न Gr-GCN-ONB (परिशिष्ट E.2.4 हेर्नुहोस्) ONB परिप्रेक्ष्यमा आधारित तुलना गर्छौं। परिणामहरू ट्याबमा देखाइएका छन्। 2. दुबै सञ्जालहरूले n = 14 र p = 7 को लागि उत्कृष्ट प्रदर्शन दिन्छ। यो देख्न सकिन्छ कि Gr-GCN++ ले Gr-GCN-ONB लाई सबै मामिलाहरूमा बाहिर निकाल्छ। Pubmed र Cora डेटासेटहरूमा प्रदर्शन अन्तरहरू महत्त्वपूर्ण छन्।
लेखकहरू:
(1) Xuan Son Nguyen, ETIS, UMR 8051, CY Cergy Paris University, ENSEA, CNRS, फ्रान्स ([email protected]);
(2) Shuo Yang, ETIS, UMR 8051, CY Cergy Paris University, ENSEA, CNRS, फ्रान्स ([email protected]);
(3) Aymeric Histace, ETIS, UMR 8051, CY Cergy Paris University, ENSEA, CNRS, फ्रान्स ([email protected])।
यो कागज हो
[१] https://github.com/zhiwu-huang/SPDNet।
[2] https://papers.nips.cc/paper/2019/hash/6e69ebbfad976d4637bb4b39de261bf7-सारांश। html।








