























טבלת קישורים
גישה מוצעת
ג. ניסוח של MLR מנקודת המבט של מרחקים להיפר-מטוסים
4 ניסויים
4.1 הכרה בפעולה אנושית
אנו משתמשים בשלושה מערכי נתונים, כלומר, HDM05 (Muller et al., 2007), FPHA (Garcia-Hernando et al., 2018), ו-¨ NTU RBG+D 60 (NTU60) (Shahroudy et al., 2016). אנו משווים את הרשתות שלנו מול הדגמים החדישים הבאים: SPDNet (Huang & Gool, 2017)[1], SPDNetBN (Brooks et al., 2019)[2], SPSDAI (Nguyen, 2022a), GyroAI- HANet (Nguyen, 2022b), ו-MLR-AI (Nguyen & Yang, 2023).
4.1.1 מחקר אבלציה
שכבות קונבולוציוניות ברשתות עצביות SPD לרשת שלנו GyroSpd++ יש שכבת MLR מוערמת על גבי שכבה קונבולוציונית (ראה איור 1). המוטיבציה לשימוש בשכבה קונבולוציונית

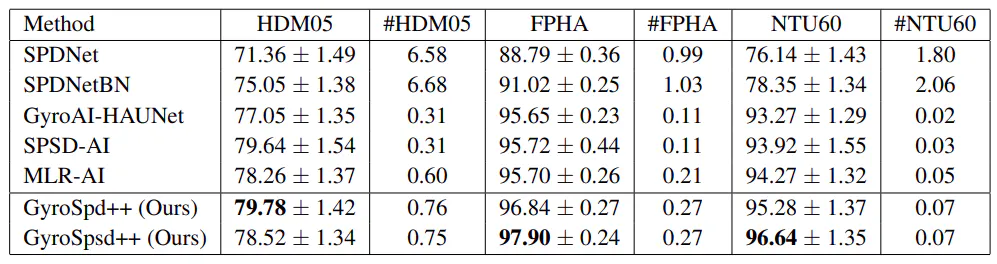


הוא שהוא יכול לחלץ תכונות גלובליות מתכונות מקומיות (מטריצות קוווריאציות המחושבות מקואורדינטות משותפות בתוך תת-רצפים של רצף פעולה). אנו משתמשים במדדים Affine-Invariant עבור השכבה הקונבולוציונית ובמדדי Log-Euclidean עבור שכבת MLR. תוצאות בכרטיסייה. 1 מראה ש- GyroSpd++ מתעלה בעקביות על קווי הבסיס של ה-SPD במונחים של דיוק ממוצע. תוצאות של GyroSpd++ עם עיצובים שונים של מדדי Riemannian עבור השכבות שלו ניתנות בנספח D.4.1.
MLR בחללי מבנה אנו בונים GyroSpsd++ על ידי החלפת שכבת MLR של GyroSpd++ בשכבת MLR המוצעת בסעיף 3.3. תוצאות של GyroSpsd++ ניתנות ב-Tab. 1. מלבד SPSDAI, GyroSpsd++ עולה על קווי הבסיס האחרים במערך הנתונים של HDM05 במונחים של דיוק ממוצע. יתר על כן, GyroSpsd++ מתעלה על GyroSpd++ וכל קווי הבסיס במערך הנתונים של FPHA ו-NTU60 במונחים של דיוק ממוצע. תוצאות אלו מראות כי MLR יעיל כאשר מתוכנן בחללי מבנה מנקודת מבט של חלל גירובקטור.
4.2 סיווג צמתים
אנו משתמשים בשלושה מערכי נתונים, כלומר Airport (Zhang & Chen, 2018), Pubmed (Namata et al., 2012a) ו-Cora (Sen et al., 2008), כל אחד מהם מכיל גרף בודד עם אלפי צמתים מסומנים. אנו משווים את הרשת שלנו Gr-GCN++ (ראה איור 1) מול הגרסה שלה Gr-GCN-ONB (ראה נספח E.2.4) בהתבסס על נקודת המבט של ONB. התוצאות מוצגות בכרטיסייה. 2. שתי הרשתות נותנות את הביצועים הטובים ביותר עבור n = 14 ו-p = 7. ניתן לראות ש-Gr-GCN++ מתעלה על Gr-GCN-ONB בכל המקרים. פערי הביצועים משמעותיים במערך הנתונים של Pubmed ו-Cora.
מחברים:
(1) Xuan Son Nguyen, ETIS, UMR 8051, CY Cergy Paris University, ENSEA, CNRS, France ([email protected]);
(2) Shuo Yang, ETIS, UMR 8051, CY Cergy Paris University, ENSEA, CNRS, France ([email protected]);
(3) Aymeric Histace, ETIS, UMR 8051, CY Cergy Paris University, ENSEA, CNRS, France ([email protected]).
הנייר הזה הוא
[1] https://github.com/zhiwu-huang/SPDNet.
[2] https://papers.nips.cc/paper/2019/hash/6e69ebbfad976d4637bb4b39de261bf7-Abstract. html.








