























Tabel over links
Foreslået tilgang
C. Formulering af MLR fra perspektivet af afstande til hyperplaner
D. Anerkendelse af menneskelig handling
F. Begrænsninger af vores arbejde
G. Nogle beslægtede definitioner
H. Beregning af kanonisk fremstilling
4 EKSPERIMENTER
4.1 ANERKENDELSE AF MENNESKEHANDLING
Vi bruger tre datasæt, nemlig HDM05 (Muller et al., 2007), FPHA (Garcia-Hernando et al., 2018) og ¨ NTU RBG+D 60 (NTU60) (Shahroudy et al., 2016). Vi sammenligner vores netværk med følgende avancerede modeller: SPDNet (Huang & Gool, 2017)[1], SPDNetBN (Brooks et al., 2019)[2], SPSDAI (Nguyen, 2022a), GyroAI- HAUNet (Nguyen, 2022b) og MLR-AI (Nguyen & Yang, 2023).
4.1.1 ABLATIONSUNDERSØGELSE
Konvolutionslag i SPD neurale netværk Vores netværk GyroSpd++ har et MLR-lag stablet oven på et foldningslag (se fig. 1). Motivationen for at bruge et foldningslag

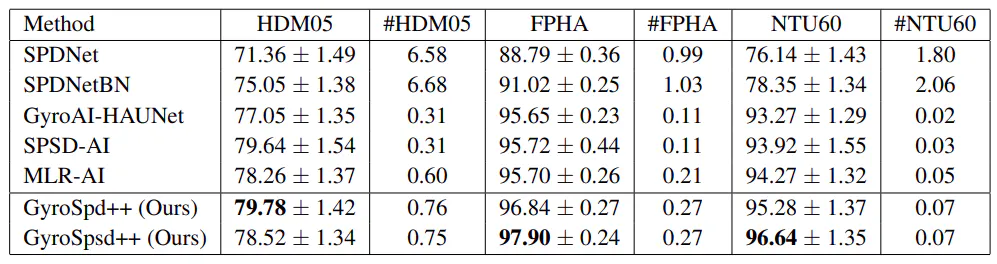


er, at den kan udtrække globale træk fra lokale (kovariansmatricer beregnet ud fra fælles koordinater inden for undersekvenser af en handlingssekvens). Vi bruger affine-invariante metrics til det foldede lag og log-euklidiske metrics for MLR-laget. Resultater i Tab. 1 viser, at GyroSpd++ konsekvent overgår SPD-basislinjerne med hensyn til gennemsnitlig nøjagtighed. Resultaterne af GyroSpd++ med forskellige designs af Riemann-metrikker for dets lag er givet i appendiks D.4.1.
MLR i strukturrum Vi bygger GyroSpsd++ ved at erstatte MLR-laget af GyroSpd++ med et MLR-lag foreslået i afsnit 3.3. Resultater af GyroSpsd++ er angivet i Tab. 1. Med undtagelse af SPSDAI overgår GyroSpsd++ de andre baselines på HDM05-datasættet med hensyn til gennemsnitlig nøjagtighed. Ydermere overgår GyroSpsd++ GyroSpd++ og alle baselines på FPHA- og NTU60-datasæt med hensyn til gennemsnitlig nøjagtighed. Disse resultater viser, at MLR er effektiv, når den designes i strukturrum fra et gyrovektorrumsperspektiv.
4.2 KNODEKLASSIFIKATION
Vi bruger tre datasæt, dvs. Airport (Zhang & Chen, 2018), Pubmed (Namata et al., 2012a) og Cora (Sen et al., 2008), hver af dem indeholder en enkelt graf med tusindvis af mærkede noder. Vi sammenligner vores netværk Gr-GCN++ (se fig. 1) med dets variant Gr-GCN-ONB (se appendiks E.2.4) baseret på ONB-perspektivet. Resultaterne er vist i Tab. 2. Begge netværk giver den bedste ydeevne for n = 14 og p = 7. Det kan ses, at Gr-GCN++ overgår Gr-GCN-ONB i alle tilfælde. Ydeevnegabene er betydelige på Pubmed- og Cora-datasæt.
Forfattere:
(1) Xuan Son Nguyen, ETIS, UMR 8051, CY Cergy Paris University, ENSEA, CNRS, Frankrig ([email protected]);
(2) Shuo Yang, ETIS, UMR 8051, CY Cergy Paris University, ENSEA, CNRS, Frankrig ([email protected]);
(3) Aymeric Histace, ETIS, UMR 8051, CY Cergy Paris University, ENSEA, CNRS, Frankrig ([email protected]).
Dette papir er
[1] https://github.com/zhiwu-huang/SPDNet.
[2] https://papers.nips.cc/paper/2019/hash/6e69ebbfad976d4637bb4b39de261bf7-Abstract. html.








